俽倲倕倎倓倷們倎倱倲僿僨傿儞僌僙儞僒乕偺峑惓偼戞堦抜奒偱慏傪侾丏俆慁夞偝偣傑偡偑慏懱傪孹偗側偄傛偆偵憖慏偡傞昁梫偑偁傝傑偡偺偱怺擔峘偲娭揹偵嫴傑傟偨攇偺彮側偄奀堟偵慏傪帩偭偰偄偒幚巤偟傑偟偨丅
嘆俶俵俤俙俀侽侽侽僱僢僩儚乕僋傪峔惉偟偨屻丄嵟弶偵揹尮搳擖偡傞偲乽曽岦僙儞僒乕偺峑惓偑昁梫偱偡乿偲儊僢僙乕僕偑弌傑偡偑慏偺弨旛偑偱偒偰偄傑偣傫偺偱乽屻偱峴偆乿傪慖戰偟傑偡丅乮偦偺屻俶俵俤俙俀侽侽侽偺摦嶌妋擣偲愙懕僨僶僀僗偺妋擣傪峴偄傑偡乯
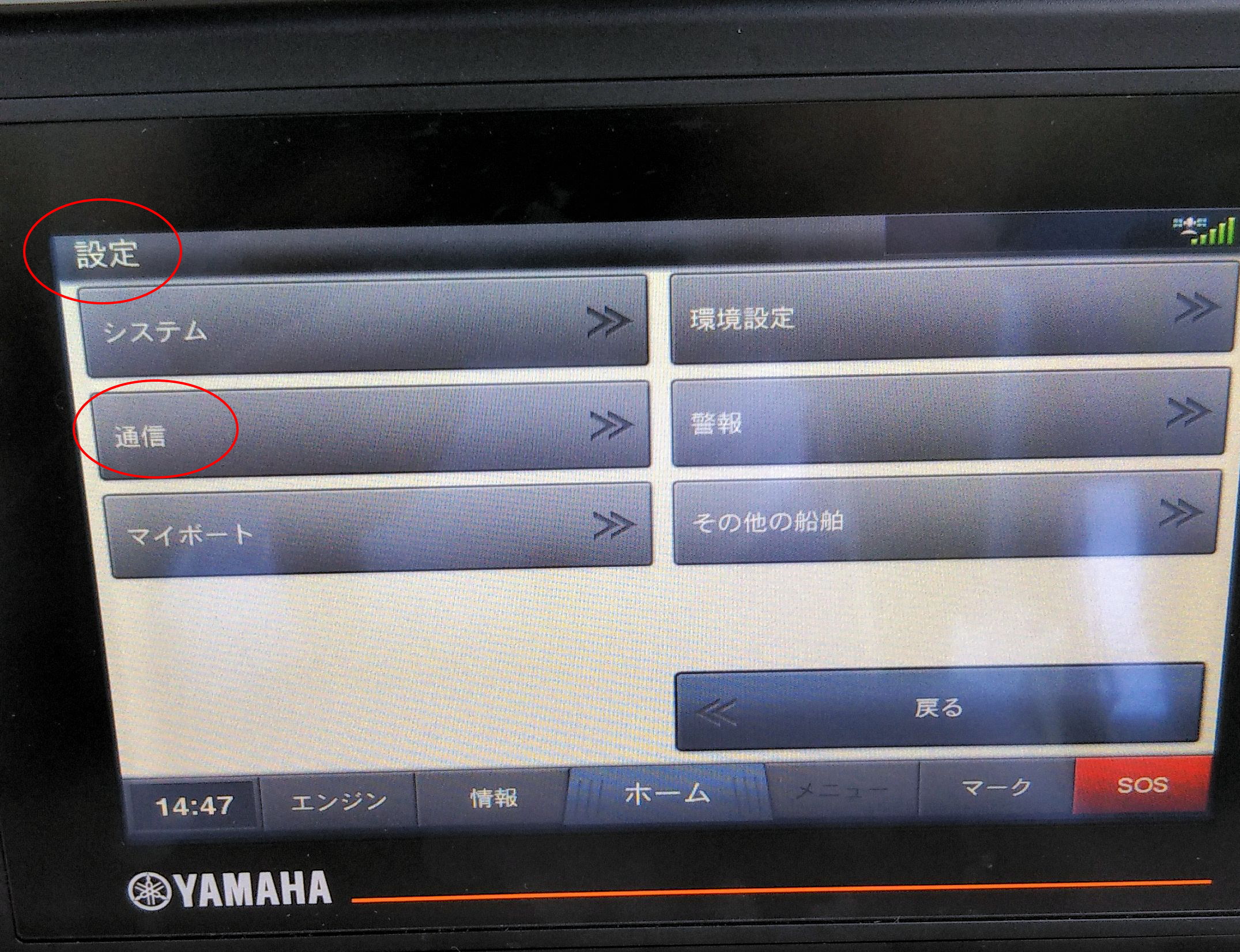
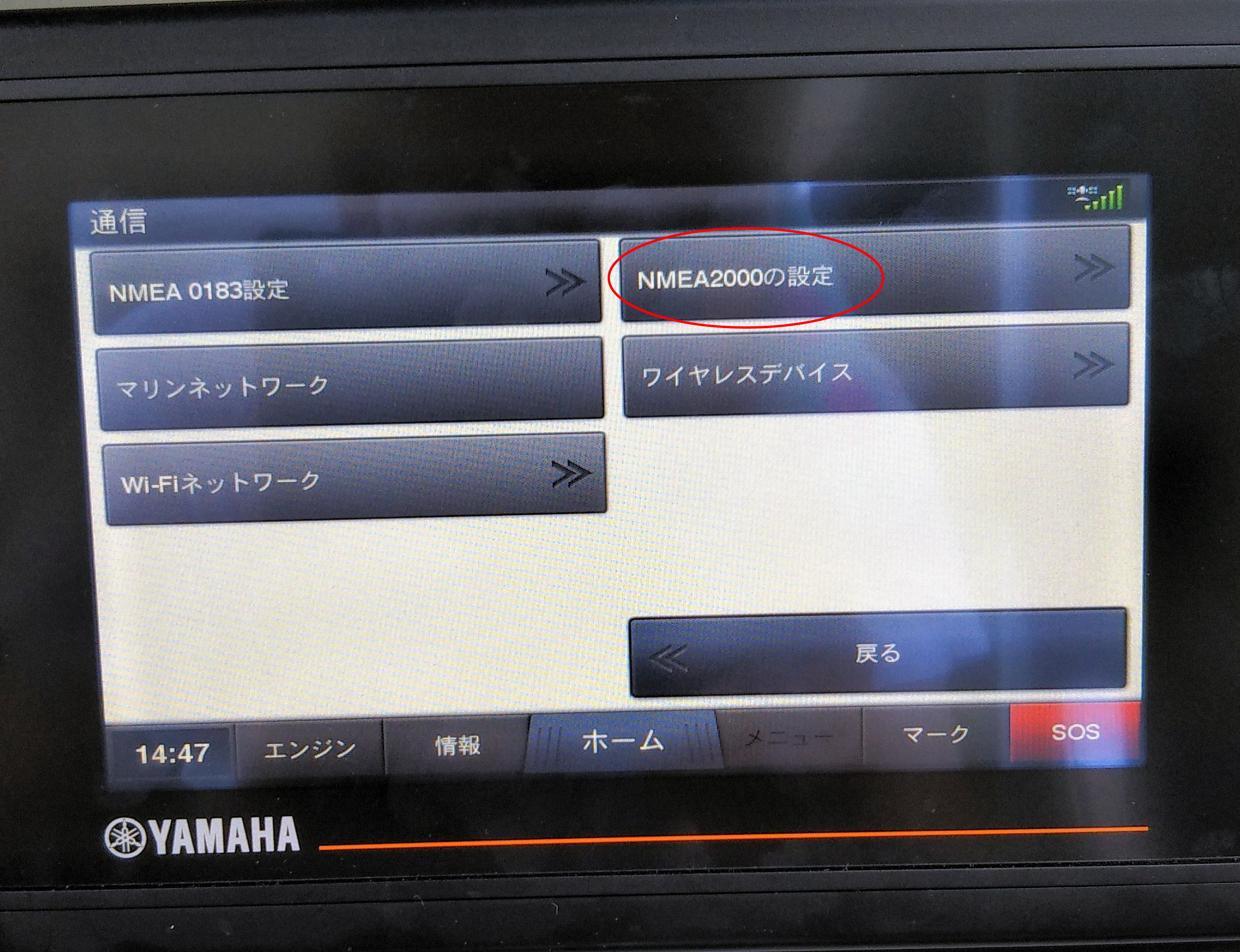
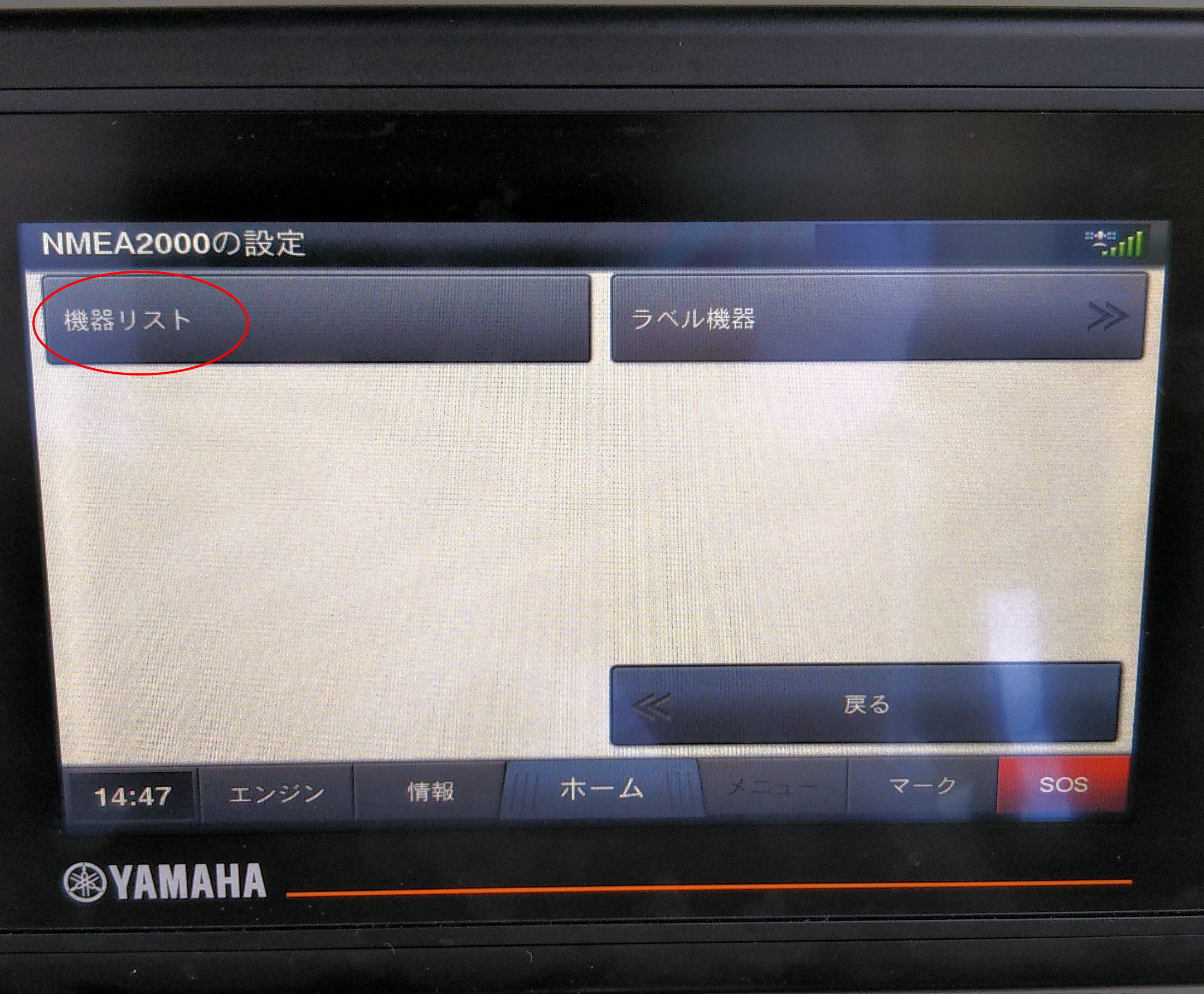
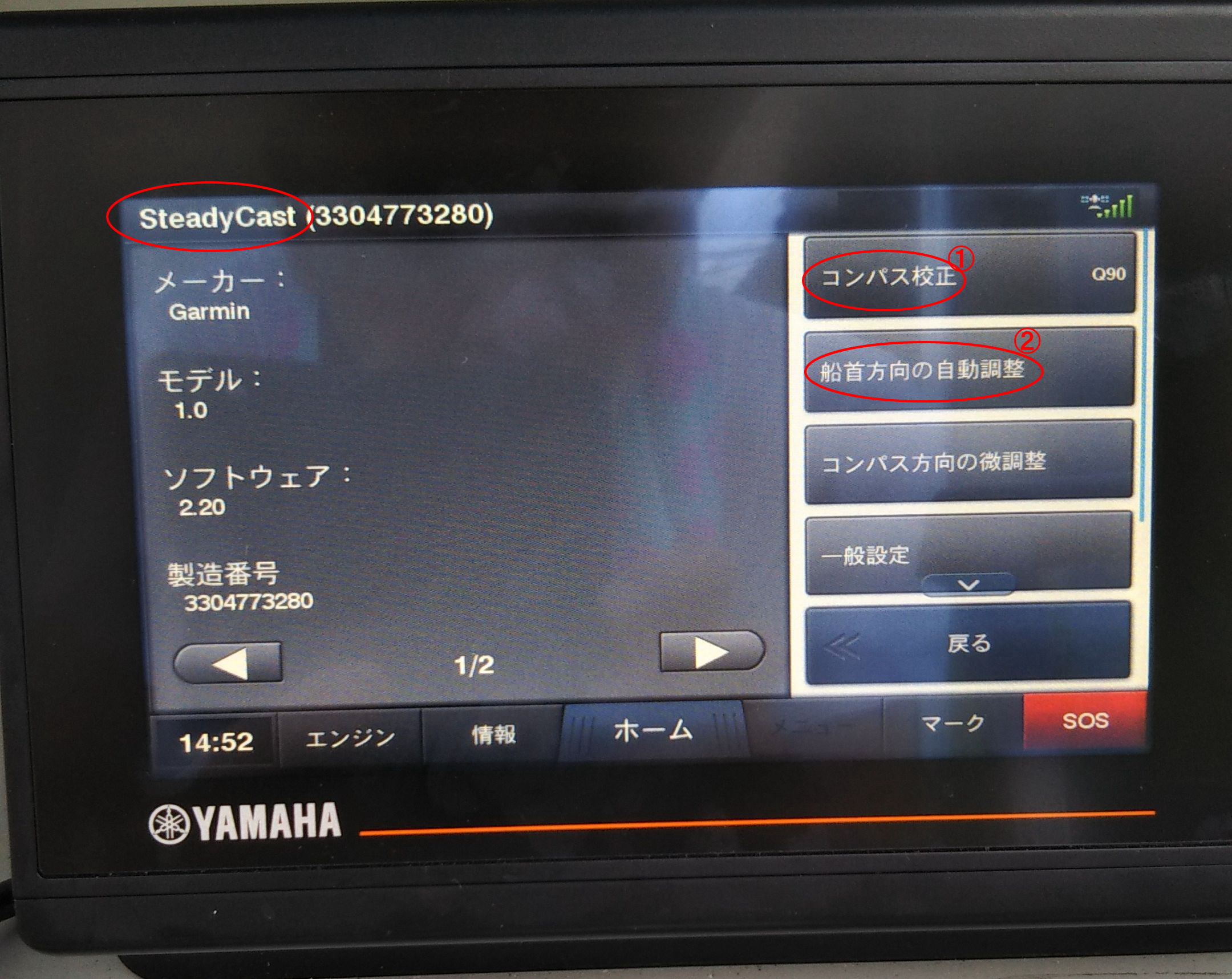
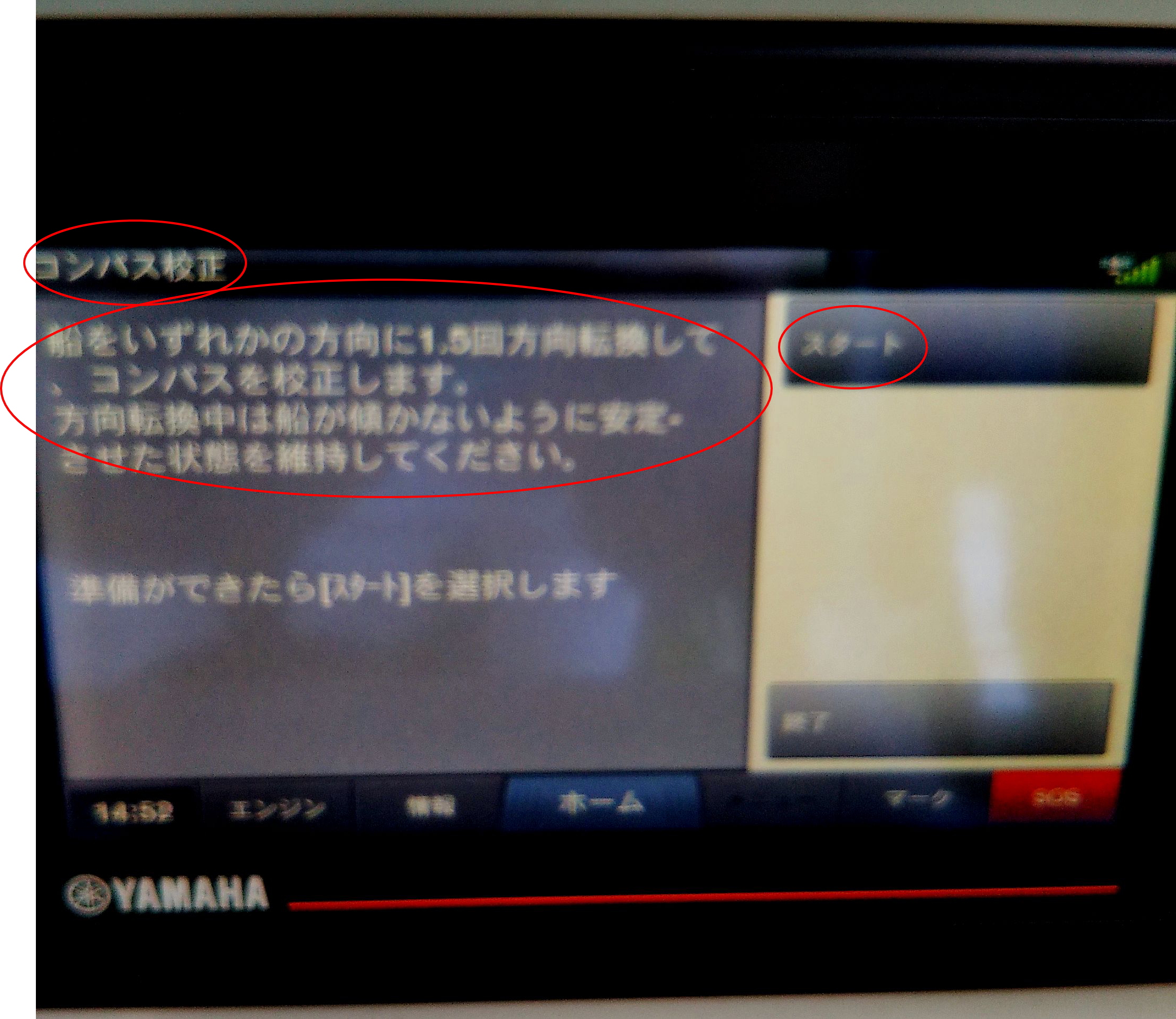
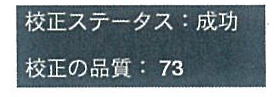
嘇忋婰応強偵慏傪帩偭偰峴偭偰偐傜丄嵞搙乽愝掕乿佀乽捠怣乿佀乽俶俵俤俙俀侽侽侽偺愝掕乿佀乽婡婍儕僗僩乿佀乽俽倲倕倎倓倷們倎倱倲乿佀乽儗價儏乕乿 偱乽俽倲倕倎倓倷們倎倱倲乿偺夋柺偐傜乽僐儞僷僗峑惓乿夋柺傪奐偔偲幨恀偺儊僢僙乕僕偑偱傑偡偺偱乽僗僞乕僩乿儃僞儞傪墴偟偰儊僢僙乕僕偺偲偍傝憖慏偡傞偲張棟拞偺儊僢僙乕僕偑弌偨屻乽峑惓僗僥乕僞僗丗惉岟乿丄乽峑惓偺昳幙丗俋侽乿偲弌傑偟偨偺偱丄帺嵎曗惓偑姰椆偟傑偟偨丅 |
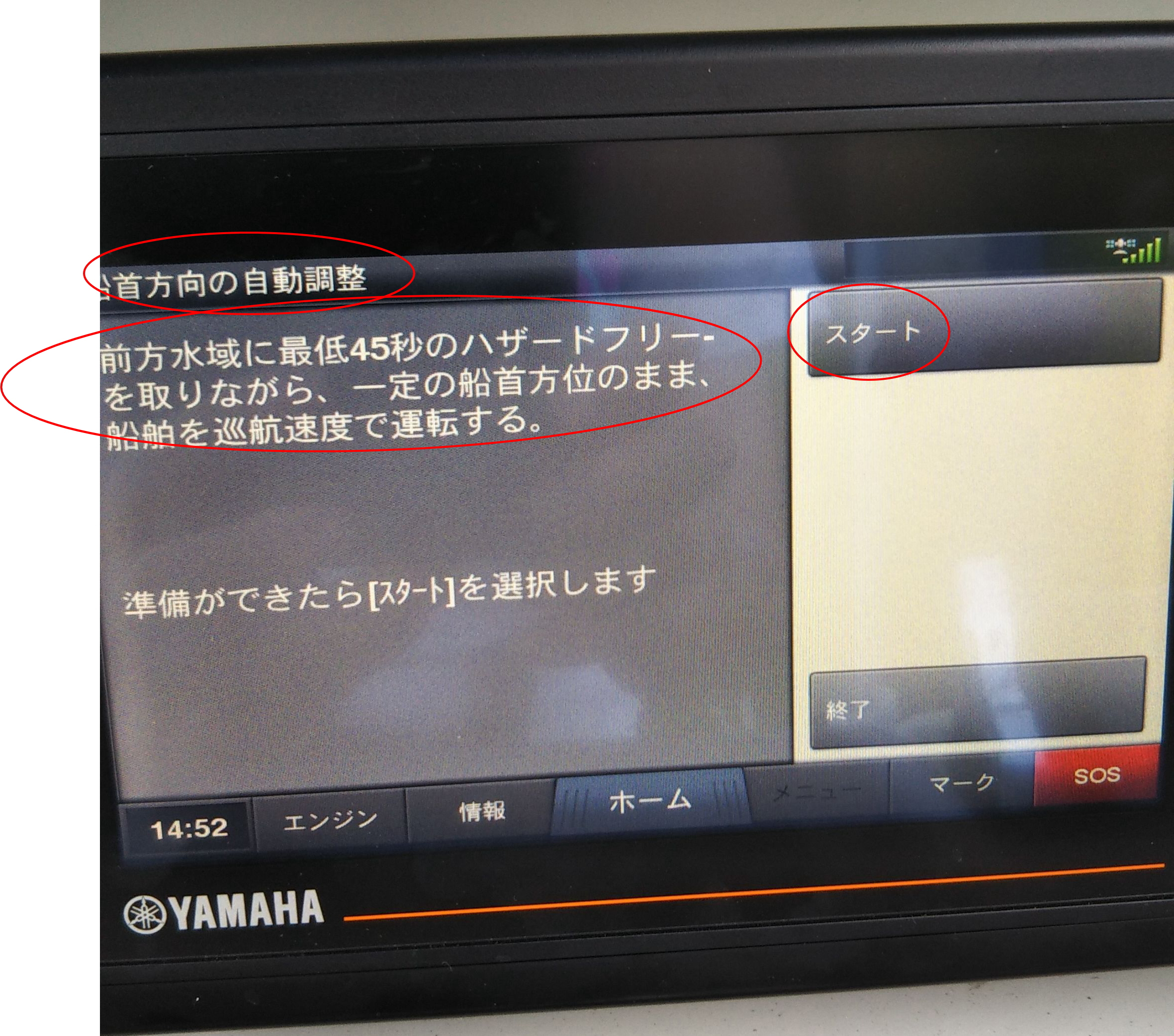
嘆帺嵎曗惓偺廔椆屻丄俽倲倕倎倓倷們倎倱倲偺夋柺偐傜乽慏庱曽岦偺帺摦挷惍乿傪慖戰偟傑偡丅
嘇 慏庱曽岦偵俇丏俆倠倣乛倛埲忋偺懍搙偱捈恑偱偒傞奀堟傪妋擣偟偨屻乽僗僞乕僩乿儃僞儞傪墴偟丄僐儊儞僩捠傝憖慏偟傑偡丅丂帺嵎曗惓偺張棟拞偲摨條偺僐儊儞僩偑弌偨屻丄乽挷惍僗僥乕僞僗丗惉岟乿偺儊僢僙乕僕偑弌傑偡丅
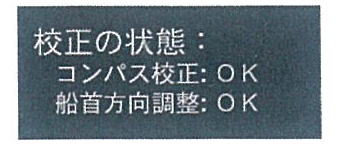
嘊偦偺屻丄幨恀偺峑惓忬懺僐儊儞僩偑弌偰廔椆偱偡丅 |